2014 |
||||||||||
|
Autores: |
||||||||||
|
Nome Nuno Filipe Correia Rodrigues (Nº 1090483) |
1090483@isep.ipp.pt |
|||||||||
|
Nome Rui César Sá Borges (Nº 1090490) |
1090490@isep.ipp.pt |
|||||||||
|
Figura 1 – Protótipo funcional A elaboração deste projeto vem no âmbito da disciplina de “Laboratórios
de Sistemas” do 2º semestre do 3º ano da Licenciatura de Eletrónica e
Computadores do ISEP, em que é necessário a elaboração de um protótipo
funcional. Este trabalho tem como requisito obrigatório, tal como nos dois
trabalhos anteriormente realizados, “Sistema Mínimo” e “Interligação de
Sensores e Atuadores”, a inclusão de um led a piscar à frequência de 1
Hz. Objetivos O objetivo a
que nos propusemos na realização deste trabalho foi a construção de um
veículo autónomo (AGV – Automatic Guided Vehicule),
sendo necessário desenvolver todo o processo de construção. Esse processo é
divido em distintas etapas, entre elas, todo o desenvolvimento do software, construção mecânica, alimentação, escolha de
hardware e todo o tipo de tarefas necessárias para obter êxito na conclusão
do projeto. Para o desenvolvimento de software, a
linguagem de programação escolhida foi a linguagem C e os respetivos
fluxogramas serão apresentados na sequência deste relatório assim como os
esquemas elétricos efetuados e por fim o desenho da placa de circuito
impresso (Printed Circuit Board - PCB) do nosso AGV. Estado Arte A tecnologia, bem como a competividade, tem
vindo a aumentar em todo o mundo, e no que diz respeito a empresas estas têm
vindo a reduzir cada vez mais os seus custos, fazendo para isso uma
otimização dos seus recursos humanos, ou seja, estão a investir cada vez mais
em tecnologias de navegação de veículos autónomos, uma vez que este não
precisam de tripulante para executar as operações pretendidas, facilitam o
transporte de mercadorias nomeadamente as mais pesadas, aumentar a
produtividade, transporte mais seguro e eficaz, maior segurança, bem como as
condições ambientais. No que diz
respeito a transportes de materiais em indústrias, principalmente em
logística, os AGV´s são utilizadas em
várias aplicações e de diversas formas. Existem vários tipos de controlo para
este tipo de veículos, entre eles, seguidores de linha, deteção de campo
magnético gerado por um fio no chão, bússola, GPS, entre outros. Este tipo de
veículos pode ser também utilizado em outros ambientes que não os
industriais, como em portos marítimos, como em aeroportos, embora neste ainda
não seja muito habitual encontrar este tipo de tecnologia. Durante a
execução deste projeto foi adotado o sistema de controlo de seguir uma linha.
Para isso foi necessário fazer o levantamento das necessidades necessárias
para a execução deste. ·
Método de
localização de AGV´s Como já referido anteriormente este tipo de veículos é muito importante na indústria, especialmente no armazenamento, produção bem como no transporte. Estes veículos estão equipados com sistemas capazes de seguir caminhos pré-definidos. Uma das principais dificuldades no que diz respeito á localização destes veículos é perceberem “onde estou”, assim e de maneira a ultrapassar estas dificuldades ao longo dos anos verificou-se a uma evolução no que diz respeito á autonomia e localização dos AGV´s. Existem vários métodos que permitem aos AGV´s seguir um determinado caminho fixo ou dinâmico. Em seguida serão apresentados algumas soluções baseadas em caminhos fixos. Soluções envolvendo filo-guiado Este tipo de sistema é a forma mais simples de localização, uma vez que, segue um percurso pré-definido. È uma solução usada em grande escala devido a simplicidade e á sua robustez. È baseado no seguimento de um campo magnético criado por condutores instalados no solo e percorridos por uma corrente elétrica. Este campo magnético e detetado por sensores instalados no próprio AGV, indicando o caminho a seguir. Este tipo de solução tem uma grande precisão, no entanto tem alguns fatores que o podem tornar pouco eficiente, desde logo a velocidade que este tem que operar, devido a não poder ter velocidades excessivas para não deixar de detetar o fio, uma vez que se deixar de o detetar poderá se perder, uma das desvantagens é a preparação do ambiente onde irá operar, uma vez que o solo terá de ter um fio elétrico.
Figura
2 - AGV com tecnologia filo-guiado
[7] Soluções envolvendo sensores ópticos Trata-se de um sistema muito idêntico ao descrito anteriormente, necessita também de um fio no solo, não necessitando de corrente elétrica pra se orientar, esse processo é feito com sensores apropriados para essa função. Uma desvantagem deste método é se houver algum tipo de degradação da linha poderá levar com que o AGV se perca, uma vez que não saberá para onde ir, deixando este de seguir a trajetória estipulada. Uma das vantagens é que podemos retirar a linha do solo e coloca-lo noutro sítio caso seja necessário alterar o percurso.
Figura 3 - AGV com tecnologia seguidor linha [7] Soluções envolvendo
trilateração/triangulação laser Este tipo de sistema envolve a trilateração/triangulação laser, ou
seja, utiliza lasers instalados em colunas, paredes, máquinas ou em postos. Por
outro lado o AGV possui um laser scanner que faz um
varrimento rotativo detetando a posição dos painéis refletores colocados ao
longo da sua área de trabalho. A posição do veículo é obtida através da
triangulação dos feixes de luz refletidos. Uma vantagem é que este sistema
permite alterar a área de trabalho, bastandando apenas recolocar os painéis
nos locais desejados e reconfigurar o veículo. Este tipo de sistemas podem
classificar-se, como sistemas de caminho dinâmico, devido a serem mais
flexíveis quando se quer alterar as áreas de trabalho destes.
Figura 4 - AGV com
tecnologia laser [7] Soluções envolvendo
giroscópios Nesta solução também podemos classificá-la como um sistema de caminho dinâmico. Este sistema é constituído pela implementação de marcadores no solo, enquanto o AGV está equipado com o giroscópio. Estes dispositivos possuem uma grande capacidade em detetar pequenos erros na direção do veículo. Os marcadores servem para corrigir e redefinir uma nova trajetória caso seja necessário, deslocando-se ao longo de uma distância até que outro marcador seja detetado, em conclusão serve para definir a posição onde se encontra e redefinir a nova trajetória a seguir.
Figura 5 - Sistema de localização por
giroscópio [7] Soluções envolvendo pára-choques mecânicos Este tipo de sistema são sistemas normalmente usados para deteção de obstáculos por parte dos sistemas baseados em localização em filo-guiado. Esta zona de deteção do para-choques é fixa e não varia, quando existe contato, é necessário um tempo adicional até que este pare, dependendo também da velocidade deste nesse momento. A desvantagens deste tipo de veículo, é que circula a velocidades baixas, uma vez que se isto que acontece poderia resultar em choques contra obstáculos.
Figura 6 - Deteção de obstáculos
através de pára-choques mecânicos [7] Soluções envolvendo sensores ultra-sons Nesta solução é envolvido o tempo de propagação de uma onda sonora para medir a que distância se encontra de um obstáculo. Este tipo de sistema é constituído por um recetor e um emissor de ultra-sons. Um sistema é responsável por emitir uma onda sonora com determinadas características, enquanto o outro sistema é responsável por fazer de recetor, detetando o eco do sinal enviado, o tempo que demora todo este processo é registado pelo emissor, sabendo a velocidade do som, depois calculará a que distância se encontra do obstáculo. Este tipo de sistema é muito utilizado pela indústria automóvel, no que diz respeito aos AGV´s ainda é uma solução com pouca utilização.
Figura 7 - Deteção de obstáculos
através de ultra-sons para a indústria automóvel
[7] |
||||||||||
|
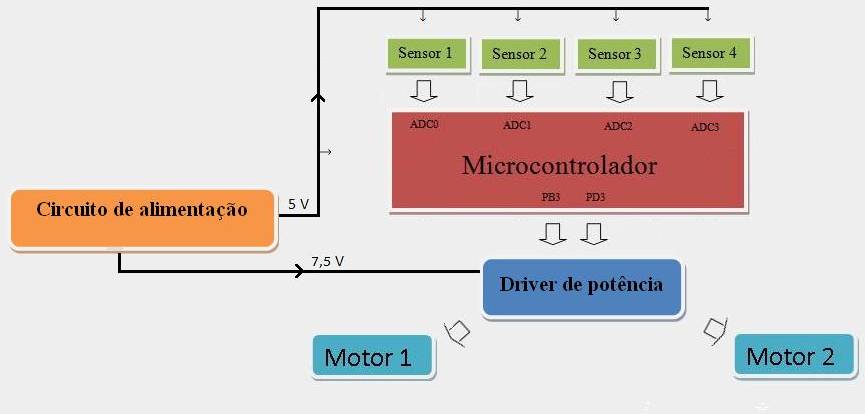
Neste tópico foi elaborado um fluxograma com a arquitetura utilizada de maneira a exemplificar, de forma sintetizada, o funcionamento do nosso sistema.
Figura 8 – Arquitetura do sistema |
||||||||||
|
Em seguida é feita uma breve explicação de todo o hardware usado na elaboração deste projeto assim como o motivo da sua escolha. Apresentamos também o esquema elétrico do nosso trabalho e a respetiva placa de circuito impresso (PCB). Material utilizado ·
Bateria No que diz respeito à alimentação optámos pela utilização de cinco pilhas em série de 1.5V cada, totalizando assim 7.5V para a alimentação. Esta tensão será ideal e suficiente para alimentar diretamente a Ponte H uma vez que esta disponibilizará nos seus pinos de saída a mesma tensão de alimentação que fornecerá aos motores, à exceção da queda de tensão inerente no sistema interno do sistema de potência. Também será utilizada para regulação de tensão no DC-DC.
Figura 9 – Disposição das pilhas cinco ·
Regulador
de tensão Para a escolha do regulador de tensão tivemos em consideração qual a tensão de entrada utilizada e qual a pretendida à saída. A utilização do PTH08000W deve-se ao facto de este satisfazer por completo todos os requisitos pretendidos, ou seja, funcionamento com tensões de entrada entre 4.5 V e 14 V, sendo a nossa de 7.5V, obtendo na saída tensões variáveis entre 0.9 V e 5.5 V, pretendendo obter 5V, ainda com uma corrente de 2.25 A. Esta escolha foi também efetuada devido ao seu custo de aquisição, pois dentro da gama de componentes semelhantes, este é um produto ‘low-cost’ tal como é referido no seu ‘datasheet’.
Figura
10 – Imagem e pinout do Pth08000W ·
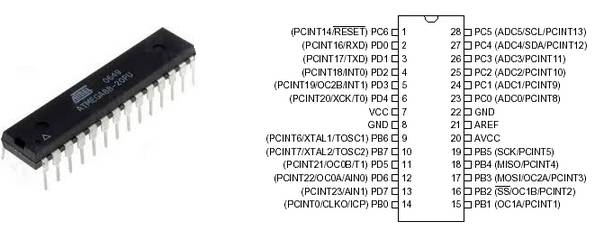
Microcontrolador No que diz respeito ao microcontrolador, utilizámos aquele com que tínhamos elaborado os trabalhos anteriores, já mencionados, ou seja, o Atmega88 PDIP da Atmel, uma vez que este tem todas as capacidades de que precisamos para a elaboração deste projeto. No nosso caso vamos precisar de quatro entradas ADC (Analog Digital Converter), uma interrupção externa (INT0), dois timer´s, um para gerar uma temporização de 2,5ms, e outro de maneira a gerarmos duas saídas de PWM para poder fazer o controlo dos motores através das pontes H.
Figura 11 –
Imagem e pinout Atmega88 ·
Motores No projeto foram usados dois motores de corrente contínua, ambos de caixa redutora, em que podemos ter tensões de entrada variáveis entre 3 e 6 Volts. A velocidade sem carga, com uma tensão na ordem dos 6V, é de 100 rpm, obtendo para estes valores de tensão correntes na ordem dos 350 mA. Portanto, para o seu correto funcionamento, não poderemos exceder este valor máximo de tensão admissível, por esses motivos estamos a trabalhar na ordem dos 6V, ou seja, estamos a ter cuidado com a tensão de funcionamento destes.
Figura 12 –
Motores DC ·
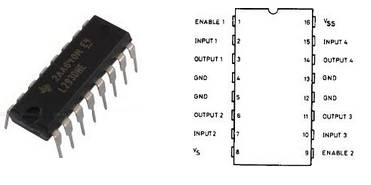
Pontes H Devido à necessidade de incluir entre a saída logica do microcontrolador e a entrada dos motores um sistema responsável pela parte de potência, optamos, para a resolução desse problema, pela utilização do L293DNE da Texas Instruments. A gama de valores de alimentação varia entre 4,5 e 36V produzindo para esta tensão uma corrente na saída de 600 mA. Este componente tem como aspeto importante o facto de possuir duas entrada de alimentação, uma para a comparação dos níveis lógicos das entradas e outra para o valor de tensão de saída, também possui quatro saídas, o que permite controlar a velocidade e sentido de dois motores através da variação do pwm (pulse-width modulation) no enable que permite a ativação de cada um dos canais de saída. A alimentação das baterias em conjugação com a queda de tensão no circuito interno deste componente, permite obter a tensão desejada para o controle dos motores.
Figura 13 –Imagem e pinout L293DNE ·
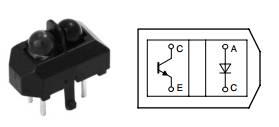
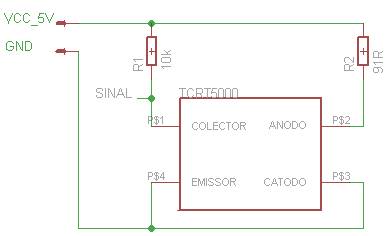
Sensores Para detetarmos as linhas foi utlizado o sensor TCRT5000 da Vishay Semiconductors. Foi feita esta opção devido á semelhança de funcionamento com o referido nas aulas teóricas, com um custo mais reduzido e uma gama de distância mais elevada.
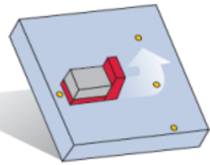
Figura 14 – Imagem e respetivo pinout do TCRT5000 Após esta escolha foi adotada uma determinada disposição, como se pode verificar na figura 15, para isso utilizamos 4 sensores, uma vez que com isto, conseguimos um maior controlo no nosso veículo no que diz respeito á velocidade e estabilidade.
Figura 15 – Disposição dos sensores de acordo com a linha Esquema elétrico Em seguida é descrito todo o esquema elétrico utilizado. Para uma melhor perceção foram criados blocos dos diversos periféricos ao invés da apresentação em apenas um esquema da totalidade do circuito. Para a construção do sistema elétrico e da PCB foi utilizado o Eagle 6.5.0 Light. Um aspeto bastante importante nas apresentações seguintes, e que deve ser tomado em atenção, é o facto de todos os componentes DIP (microcontrolador, DC-DC, ponte H, sensores) terem todos os pinos espelhados (exemplo: pino 28 do microcontrolador é o pino 1). Este problema é devido à utilização desta versão do Eagle que não possui o efeito ‘mirror’ para os componentes, então, todos os componentes que são colocados na parte inversa da PCB têm de ser espelhados, ou seja, tivemos que efetuar manualmente esse efeito de espelho alterando os pinos diretamente na biblioteca de cada um dos componentes fazendo uma conecção invertida dos pinos entre o desenho do símbolo e o ‘package’. A real distribuição da ordem numérica dos pinos é a que se encontra no “material utilizado” do capítulo anterior e não a apresentada nos esquemas seguintes em que apenas se deve ter em consideração o nome dos pinos e não a sua representação numérica. 1. Circuito
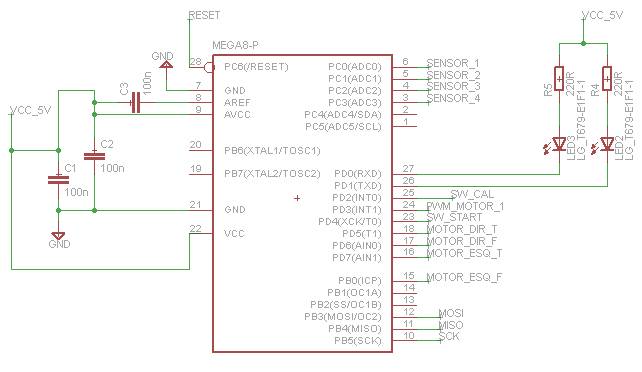
do microcontrolador No que diz respeito a este bloco podemos verificar que, entre os pinos VCC e GND existe um condensador de 100nF, este componente é aconselhado para eventuais oscilações ou ruído existentes, pode-se encontrar um outro condensador de igual valor entre os pinos AREF e AVCC, este devido à configuração do ADMUX, uma vez que, ao configurar este registo estamos a utilizar a tensão de referência AVCC e no ‘datasheet’ do microcontrolador é descrito a inserção de um condensador entre estes dois pinos. Por último o condensador entre AVCC e GND é colocado no circuito pelos mesmos motivos descritos no condensador entre VCC e GND. Nos portos PD0 e PD1, existem dois Leds com a respetiva resistência de proteção de corrente. Estes dois Leds dizem respeito ao Led pisca, com oscilação a uma frequência de 1Hz, conforme enunciado anteriormente, o outro corresponde ao Led de calibração que é ativo durante a calibração dos quatro sensores. Nos portos PC0, PC1, PC2 e PC3 temos os sensores de linha e que correspondem aos conversores analógico-digitais que servem para ler os valores dos mesmos em valor analógico convertendo-os para um valor digital passível de ser trabalhado por software. Nos portos PD2 e PD4 temos os ‘switches’ de calibração e ‘start’ respetivamente, que tal como o nome sugere, refere-se a calibração dos sensores e ao seu inicio de funcionamento Os portos PD3, PB3, PD5, PD6, PD7 e PB0, representam o controlo dos motores ligados ao circuito da ponte H, representado na figura 16. Os portos PB3, PB4, PB5 e PC6 representam o conetor de seis pinos para a programação do microcontrolador, representado na figura 20.
Figura 16 – Circuito
microcontrolador 2. Circuito
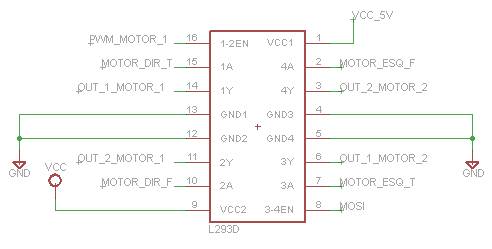
da ponte H Como já referimos no capítulo anterior, este componente possui duas entradas de alimentação, sendo alimentado diretamente o pino representado por VCC2 pelas baterias (7.5V) e o pino VCC1 pelos 5V para comparação logica das entradas. Os pinos 1A, 2A, 3A e 4A são de entrada lógica e servem para receber o valor da saída do microcontrolador, os dois primeiros referem-se ao estado que iremos pretender referente ao motor do lado direito e os seguintes ao motor do lado esquerdo. Os pinos 1Y, 2Y, 3Y e 4Y, são os pinos das saídas e representam o estado de cada um dos pinos referidos no parágrafo anterior, sendo que o seu valor em tensão é obtido através do valor da alimentação do pino VCC2. Os pinos 1Y e 2Y são as entradas do motor do lado direito e os restantes as entradas do motor do lado esquerdo. O ‘enable’ de cada um dos lados distintos de funcionamento é efetuado através dos pinos 1-2EN e 3-4EN, sendo o primeiro responsável pelo motor do lado direito e o segundo pelo motor do lado esquerdo. Como estes pinos podem colocar ou retirar as respetivas saídas de funcionamento utilizamos a saída de pwm (OC2A e OC2B) do microcontrolador para alimentar estes dois pinos, uma vez que assim conseguimos alterar a velocidade dos motores alternando o valor lógico destas entradas. Os restantes pinos ainda não referidos são pinos de massa do componente.
Figura 17 – Circuito ponte H 3. Circuito
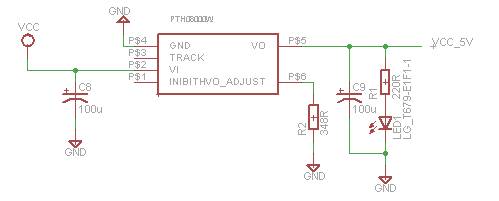
regulador de tensão (DC-DC) Neste bloco é representado o esquema do DC-DC, em que à entrada (VI) alimentamos à tensão das baterias obtendo à saída (VO) 5V. Esta tensão é conseguida através da colocação da resistência de calibração (348Ω) entre o pino de VO_ADJUST e a massa. O cálculo do valor desta resistência, ou mesmo o seu valor tabelado, pode ser verificado no datasheet [página 7] do PTH08000W. Além da colocação dos condensadores de proteção recomendados pelo fabricante no esquema elétrico, decidimos também inserir um LED para que visivelmente seja possível verificar o correto funcionamento do DC-DC.
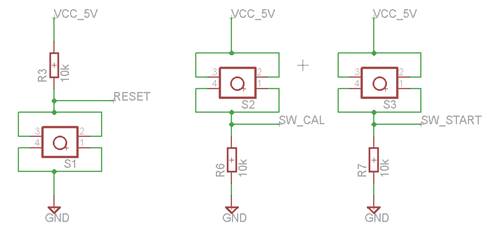
Figura 18 – Circuito regulador de tensão(DC-DC) 4. Circuito botões Neste ponto é exemplificado o esquema elétrico dos ‘swicthes’ de ‘reset’, calibração e de ‘start’. Estes pinos estão ligados ao microcontrolador nos portos PC6, PD2 e PD4 respetivamente.
Figura
19 – Circuito dos switches de reset,
calibração e start 5. Circuito
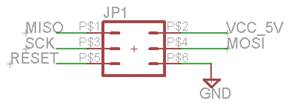
do conetor de programação Em seguida é demonstrado o conetor de programação para o microcontrolador. Os pinos com o nome MISO (PB4), SCK (PB5), RESET (PC6) e MOSI (PB3) são os pinos de calibração do microcontrolador sendo que o de VCC e GND servem para retificar se a alimentação a este está correta.
Figura 20
– Circuito do conetor de programação 6. Circuito
dos sensores Como a distribuição da posição de cada sensor na parte inferiora do AGV iria limitar o tamanho da linha a ser seguida, optamos pela colocação de cada sensor em PCB’s isoladas individualmente colocando a possibilidade de ser alterada a sua posição, no suporte elaborado para o efeito, conforme o necessário. Uma vez que todas as placas são iguais, diferindo apenas na ligação à entrada de conversão analógico-digital do microcontrolador, apresentamos somente uma delas.
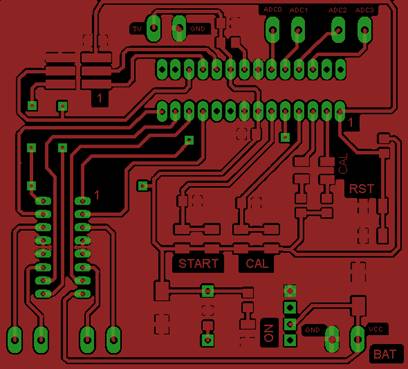
Figura 21 – Circuito dos sensores PCB Após a construção de todo o esquema elétrico, procedeu-se à sua conversão para layout. Dispusemos todos os componentes da forma mais adequada e efetuamos todas as ligações, obtendo uma PCB com a aspeto da figura 22. O esquema elétrico dos sensores foi convertido também noutra PCB, deste modo ficamos com uma placa com o aspeto da figura 23.
Figura 22 – PCB principal Figura 23 – PCB sensores |
||||||||||
|
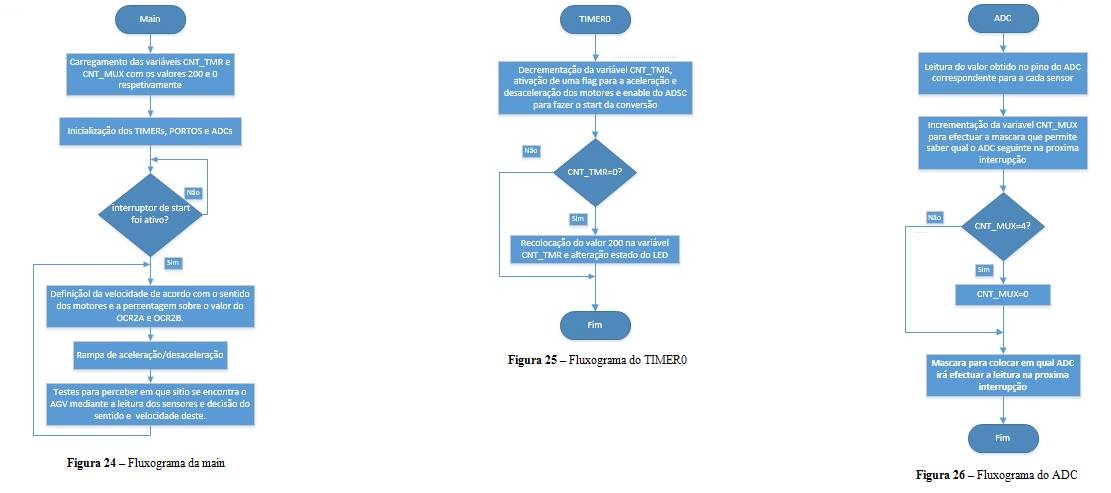
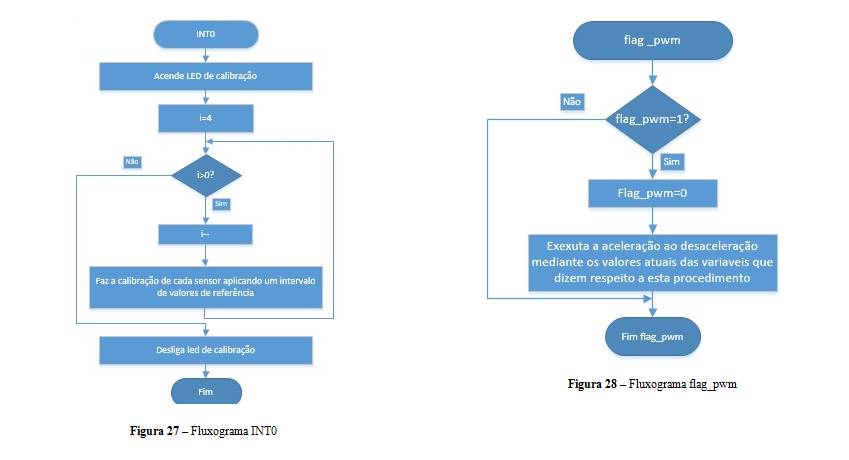
Em seguida é explicado em fluxogramas o funcionamento do software do nosso sistema. Também apresentamos os cálculos das interrupções e a explicação do preenchimento de todos os registos utilizados. É ainda disponibilizado um link que permite aceder ao código fonte utilizado. Fluxogramas
Interrupções e preenchimento dos registos ·
Interrupções T= Para um período de 2,5ms e com o OCR no seu valor máximo (para o Timer0): T= Como o valor mais próximo e superior comparado com o valor do prescaler obtido no cálculo anterior é de 64 iremos então utilizá-lo para calcular o valor do OCR: T= TCCR0A - Timer/counter control
register A
Tabela 1 – Preenchimento do TCCR0A
TCCR0B- Timer/counter control register B
Tabela 2 – Preenchimento
do TCCR0B
No TCCR0A os bits 7,6,5 e 4 definimos com o valor 0 para trabalharmos em ‘Normal port operation’, ou seja, ‘OC0A disconnected’ e ‘OC0B disconnected’. Para trabalhar no modo 2, ou seja, em modo CTC tem que se colocar em WGM02, WGM01 e WGM00 os bits 010 respetivamente. Para funcionar com o clkIO/64 para o prescaler os valores são CS02=0, CS01=1 e CS00=1. TIMSK0 - Timer/counter interrupt mask
register Tabela 3 – Preenchimento do TIMSK0
Ao colocar o OCIE0A com o valor 1 estamos a fazer o ‘enable’ para permitir a interrupção por comparação. Como só precisamos de uma interrupção só nos interessa fazer o ‘enable’ a uma saída de interrupção por comparação. ADMUX
– ADC multiplexer selection
register Tabela 4 – Preenchimento do ADMUX
Os bits 7 e 6 são colocados a 0 e a 1 respetivamente para ativar como tensão de referência a tensão AVcc. O bit do ADLAR é colocado a 0 pois iremos trabalhar com os dez bits de conversão. Ao colocar os quatro bits menos significativos todos a zero estamos a definir a ADC0 como canal de entrada. (Este valor é alterado no decorrer do programa para selecionar outros pinos de conversão). ADCSRA- ADC control and status register A Tabela 4 – Preenchimento do ADCSRA
O bit 7 coloca-se a 1 para fazer o ‘enable’ do ADC. O ADSC coloca-se a 1 quando se quiser iniciar a conversão. Coloca-se o ADIE a 1 pois este bit, juntamente como ‘enable’ da autorização da interrupção global permite a ativação da interrupção de conversão completa ADPS2=0, ADPS1=1 e ADPS0=1 permite fazer uma divisão por 8 à frequência do ATmega88 para trabalhar a uma frequência compreendida entre 50 e 200kHz. TCCR2A - Timer/counter control
register A Tabela 5 – Preenchimento do TCCR2A
TCCR2B - Timer/counter control
register B Tabela 6 – Preenchimento do TCCR2B
No TCCR2A os bits 7 e 5 colocamos a 1 e os bits 6 e 4 definimos com o valor 0 para trabalharmos em ‘Clear OC2A on compare match’ para a saída A e para a saída B. Para trabalhar no modo 1, ou seja, em modo PWM, phase correct tem que se colocar em WGM22, WGM21 e WGM20 os bits 001 respetivamente. Para trabalhar sem prescaler os valores são CS22=0, CS21=0 e CS20=1. EICRA – External
Interrupt Control
Register A Tabela 7 – Preenchimento do EICRA
Com estes dois bits a 1 (ISC01 e ISC00) estamos a definir a interrupção no flanco ascendente. EIMSK- External Interrupt Mask Register Tabela 8 – Preenchimento do EICRA
Ao colocar o bit menos significativo a 1, estamos a fazer o ‘enable’ do INT0. Código fonte |
||||||||||
|
Neste tópico foi efetuado um vídeo para demonstrar o AGV em funcionamento. Para se poder visualizar basta clicar em cima deste.
|
||||||||||
|
Como comentário final, após concluir todas as etapas do nosso projeto, podemos afirmar que os objetivos inicialmente traçados foram totalmente atingidos e consequência disso a nossa satisfação pela realização do que nos havíamos proposto a fazer. Não obstante a isso, depois de terminado o trabalho e analisar o seu funcionamento, verificarmos que poderia ter sido criado uma quantidade de melhorias a serem efetuadas mas que o restante tempo, depois de este estar concluído, não o permitiu fazer, os quais iremos abordar para que numa situação futura seja possível aperfeiçoar aquilo que agora fizemos. Um dos requisitos deste projeto era a continuidade do que já havia sido feito nos trabalhos anteriores, ou seja, a inclusão de um LED a piscar a uma frequência de 1Hz. Uma vez que as dificuldades que esta condição nos poderia ter criado já tinham sido superadas não existindo complicações com esta tarefa. O objetivo principal, que era a construção de um veículo autónomo capaz de seguir um percurso pré-definido através da colocação de uma linha no solo, também foi atingido mas com um maior número de dificuldades. O funcionamento do nosso AGV permite seguir qualquer tipo de linha, não estando dependentemente da cor da mesma, apenas é necessário uma diferença significativa nas cores a serem utilizadas para que seja possível identificar a diferença entre a linha e o seu exterior. Este processo é feito com sensores apropriados para essa função e uma calibração prévia para o reconhecimento da cor a ser seguida. Essa mesma calibração é efetuada através da leitura, em tensão, que cada sensor faz da linha sendo aplicado um intervalo de segurança no seu valor, a linha pode também conter curvas com qualquer tipo de amplitude, cruzamentos entre elas e fins de percurso. Na construção mecânica, tivemos um cuidado redobrado com a distribuição do peso. A colocação de um botão de pressão que permite apenas desligar o funcionamento dos motores foi colocado em cima da roda traseira, o que permite que este seja pressionado sem danificar ou fazer uma rotação ao veículo. A bateria foi colocada na zona central da plataforma para que o seu peso seja suportado pelas rodas. Quanto à placa principal foi posta na zona frontal uma vez que a sua influência é bastante reduzida. Quanto ao software tentamos reduzir ao máximo as linhas de código e os testes a serem efetuados durante a execução do programa para que fosse o mais rápido possível a executar e a testar qualquer uma das ações pretendidas. Sabemos porém que este poderia ser melhorado para efetuar outro tipo de testes que permitissem mais autonomia em mais variados percursos e com outro tipo de obstáculos. Por fim, a criação da PCB, trouxe-nos também algumas dificuldades sendo necessária a alteração de alguns portos que anteriormente, em testes, tinham sido definidos, para ser mais fácil ligar e reduzir o tamanho das pistas, tendo sempre em linha de conta aqueles dos quais era impossível efetuar alterações. Como também referimos durante a elaboração do relatório, encontramos alguns problemas nos componentes DIP utilizados uma vez que a versão do Eagle utilizada não possuía o efeito de espelho para os componentes. Durante os testes ao nosso protótipo verificamos que existia uma necessidade de introduzir um LED para cada sensor que identifica-se quando este se encontrava na linha para efetuar debug quando fosse necessário. Como implementações futuras poderemos indicar alguns aspetos que poderiam ser melhorados. O parágrafo anterior identifica uma dessas melhorias, sendo que poderíamos também ter colocado um pente ou outro tipo de componente semelhante que disponibiliza-se alguns I/Os do microcontrolador para que assim não fosse necessário inserir 4 LEDS, o que ocuparia espaço na PCB, e sim fazer essa ligação exteriormente. Isto também permitiria ter sempre disponível esses I/Os para poder inserir outro tipo de periféricos sem alterar a PCB já criada. Outra melhoria que podia ter sido feita era a adaptação de encoders para poder efetuar outro tipo de ações como ser possível visualmente observar a velocidade a que veiculo circulava. Também era possível introduzir uma função de PID que permitiria obter uma maior estabilidade no AGV. Os motores utilizados também poderiam ser substituídos por outros que permitissem reduzir a velocidade a valores mais baixos do que era suportado pelos utilizados no nosso protótipo, ou seja, ter uma maior caixa redutora. Para que pudessem ser evitados alguns obstáculos também poderiam ser colocados sensores de distancia que permitiria uma maior abrangência em circulação.
|
||||||||||
|
[1] http://www.ti.com/lit/ds/slts248b/slts248b.pdf [2] http://www.atmel.com/Images/2545s.pdf [3] http://www.ti.com/lit/ds/symlink/l293d.pdf [4] http://www.vishay.com/docs/83760/tcrt5000.pdf [5] http://ap.isr.uc.pt/archive/37.pdf [6] http://www.abepro.org.br/biblioteca/enegep2013_TN_STO_177_010_22461.pdf [7] http://repositorio-aberto.up.pt/bitstream/10216/58480/1/000142643.pdf [8] http://www.nyplatform.com/index.php?route=product/product&path=115_150&product_id=860 A última visualização destas referências bibliográficas foi efetuada a 22/06/2014 |
||||||||||