LABSI
2019
Autores:
Diogo Paupério - 1151615
1151615@isep.ipp.pt
Pedro Apura - 1161089
1161089@isep.ipp.pt
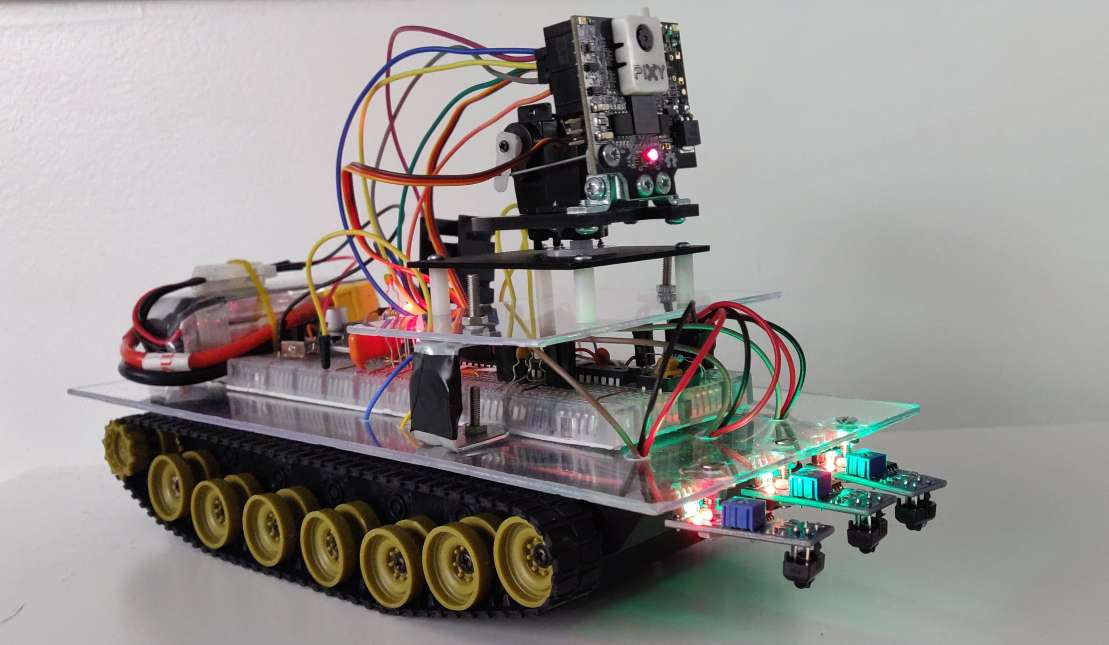
No ambito da unidade curricular de LABSI, propusemos a criação de um agv seguidor de linha que detetasse objetos através da cor.
Ao ligar o AGV este deve seguir uma linha preta definida pelos responsáveis da disciplina.
O controlo dos motores do AGV serão feitos através da interface do atmega328p com o modulo L293D, por efeito de dois sinais PWM um para cada motor.
Utilizando o modulo PIXYCAM5 para a deteção do objeto de cor e para relatar a posição do objeto de volta para o atmega328p através de uma interface spi.
Por fim quando o objeto se encontrar no centro, ativa-se um atuador(laser).
Objetivos do projeto:
Sistema Atmega328p + L293D + Sensores IR + Motores DC + Servo Motores + PIXYCAM
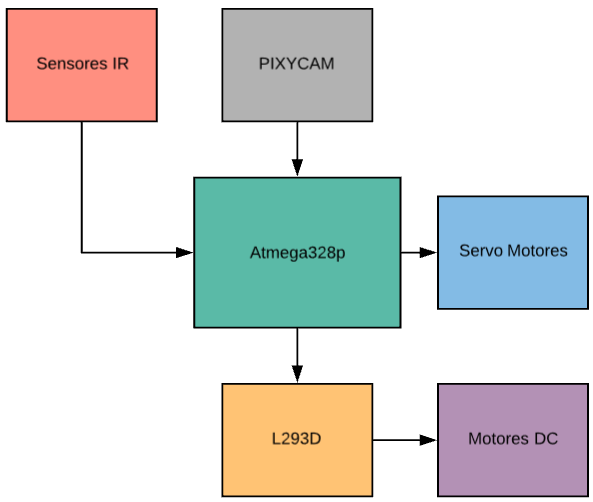
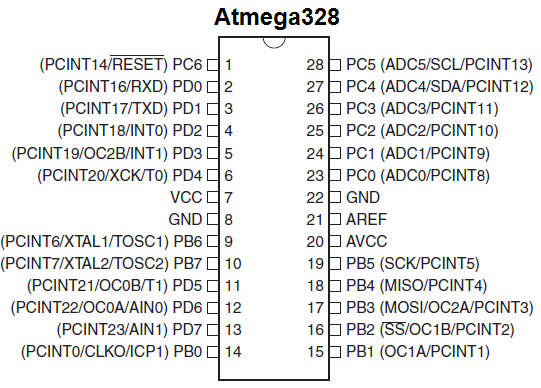
Atmega 328p: Microcontrolador que permite processar a informação que recebe, de modo a gerar um output, que neste subsistema corresponde à variação da velocidade dos motores DC e posição dos servos.
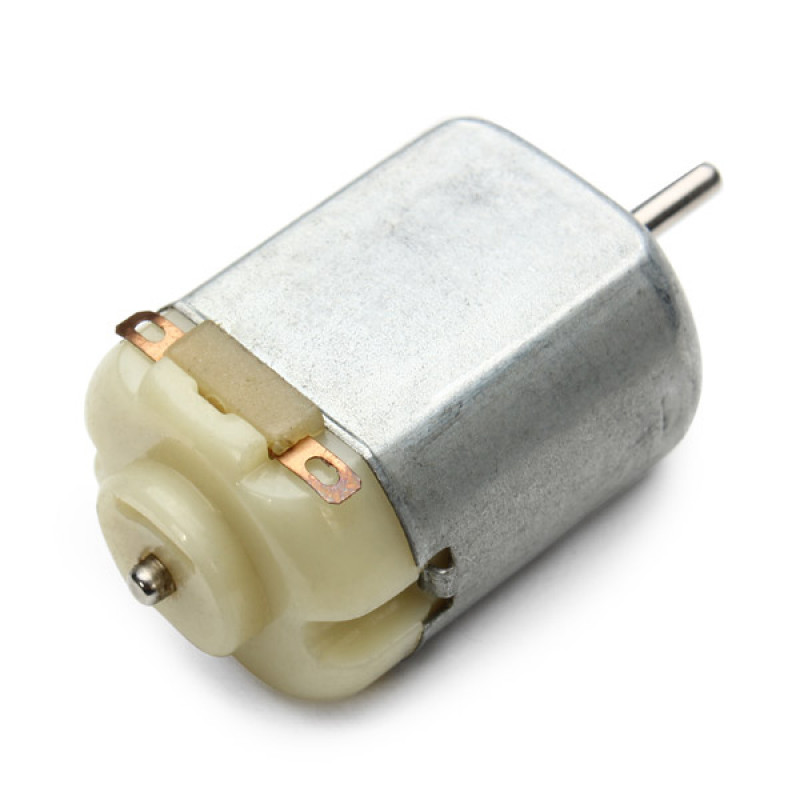
Motores DC: Motor elétrico de corrente contínua, que transforma energia elétrica em mecânica.
L293D: Driver que permite o controlo de motores através da ponte H.
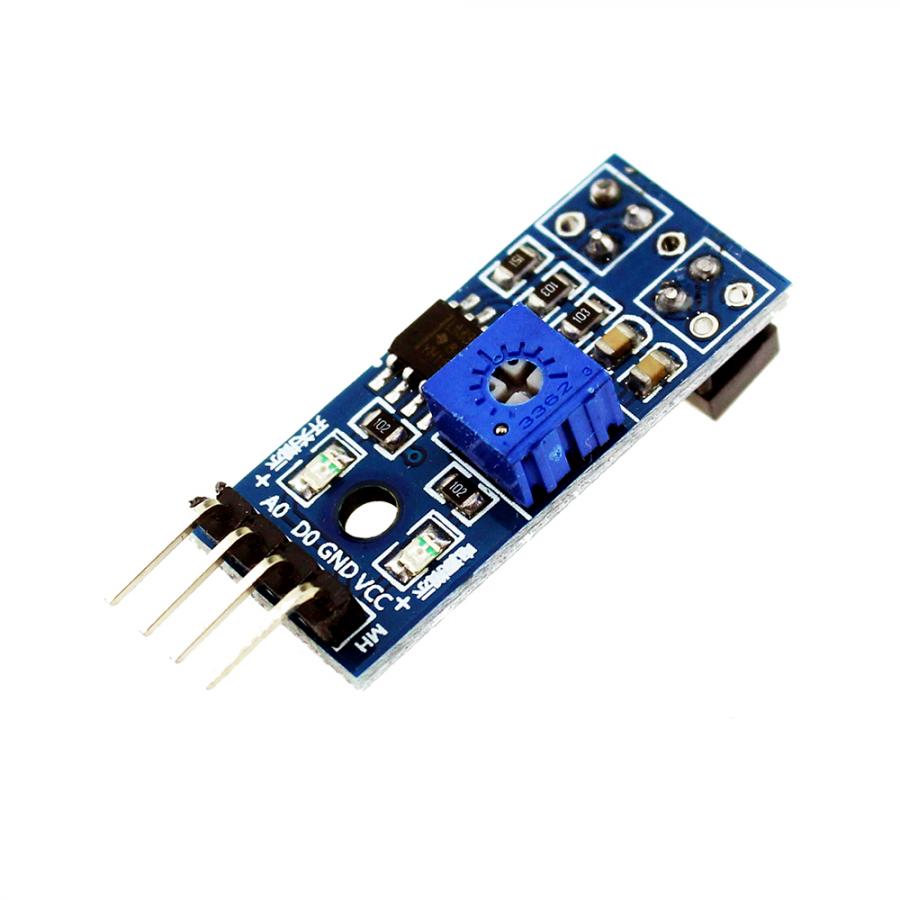
Sensores IR: Sensores de infravermelhos composto por um emissor e um recetor.
PIXYCAM: Uma câmara com um microcontrolador integrado, com o propósito de ser utilizada na investigaçaõ robótica.
Sero Motores: Um motor no qual podemos controlar a sua posição angular atravé de um sinal pwm.
Subsistema Motores DC
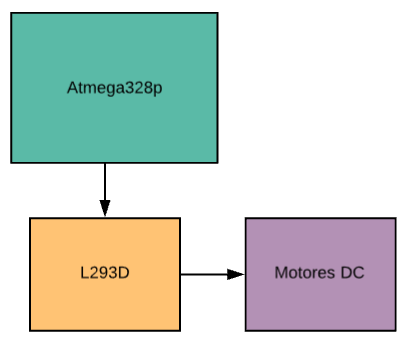
AtMega328P: Ao receber os dados dos sensores, o microcontrolador vai comparar o valor de referência com o valor obtido. De seguida irá gerar dois sinais PWM para o L239D. Provocando ou não uma alteração na velocidade dos motores, e uma possível inversão de rotação dos mesmos.
Controlo dos motores: Permite aumentar ou diminuir a velocidade dos motores.
Subsistema Sensores IR
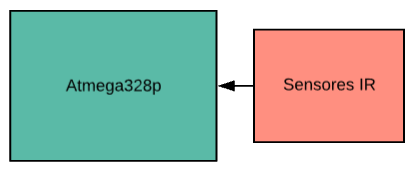
AtMega328p: Ao receber os valores analógicos dos sensores, o microcontrolador vai tomar medidas conforme os seus valores.
Controlo Sensores IR: Permite receber os valores de tensão e convertê-los para analógico.
Subsistema L293D
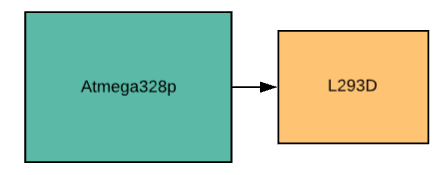
AtMega328p: O microcontrolador vai gerar dois sinais PWM para o L239D, como também o sentido de rotação dos motores, resultante da ponte H do circuito integrado.
Controlo do L293D: Permite aumentar ou diminuir a velocidade dos motores, e inverter o sentido de rotação.
Subsistema PIXYCAM
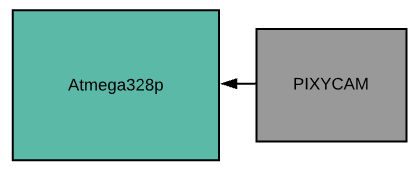
AtMega328p: O microcontrolador vai recolher os valores de posição da PIXYCAM, através da interface SPI.
Controlo da PIXYCAM: Permite recolher os valores de posição X e Y para o microcontrolador.
Subsistema Servo Motores
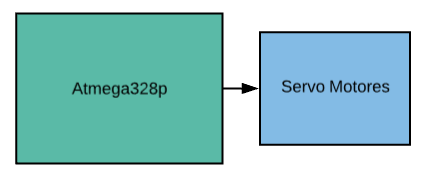
AtMega328p: O microcontrolador vai gerar dois sinais PWM para cada um dos servo motores, de modo a indicar a posição X e Y.
Controlo dos servo motores: Permite controlar a posição dos servos.
Sistema Módulo Bluetooth HC-06 + AtMega324P + PC
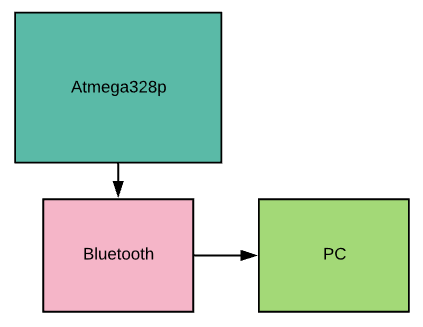
AtMega328P: Executa o programa normalmente à medida que envia valores para debugging, diretamente para o módulo Bluetooth.
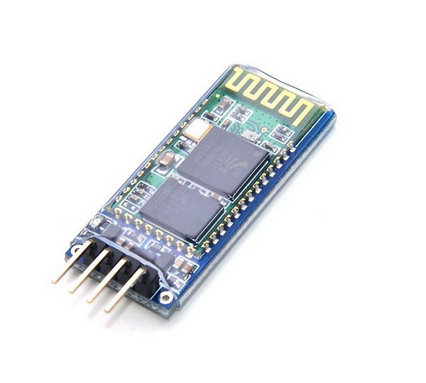
Módulo Bluetooth HC-06: Ao receber os valores do microcontrolador, estes vão ser enviados para o PC através do módulo Bluetooth. De modo a conseguir realizar um debugging mais eficiente e mais prático.
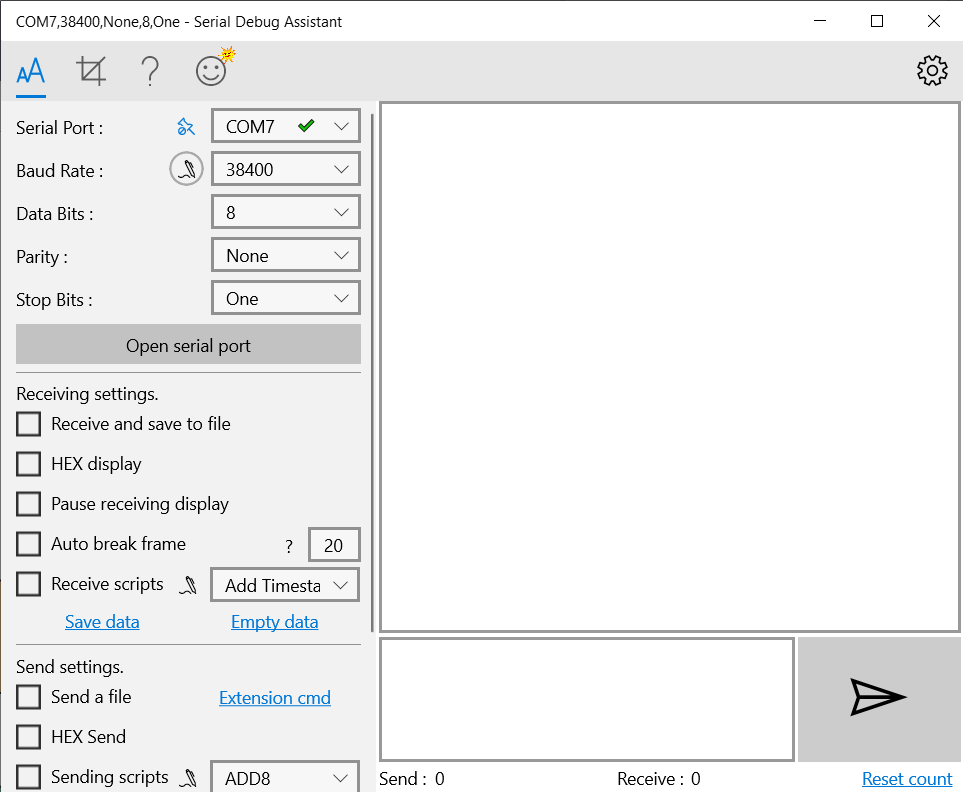
PC: Recebe os dados do microcontrolador e apresenta-os numa aplicação.
Descrição do Hardware:
ATMega 328P [1]
Sensor IR (TCRT5000) [2]
Motor DC 130 [3]
Módulo Bluetooth HC-06 [4]
Servo Motor [5]

Pixycam [6]

Tattu [7]

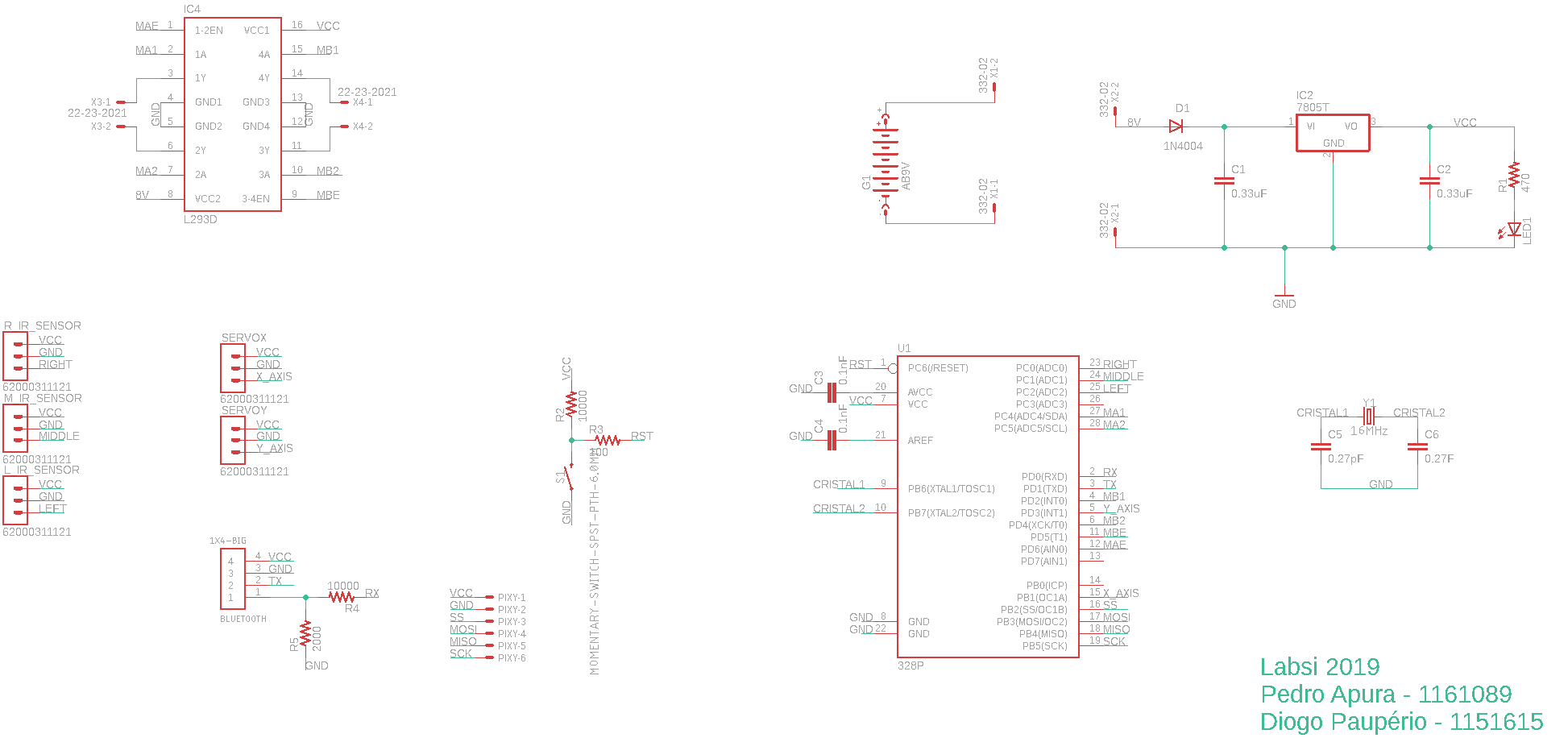
Esquemas Elétricos
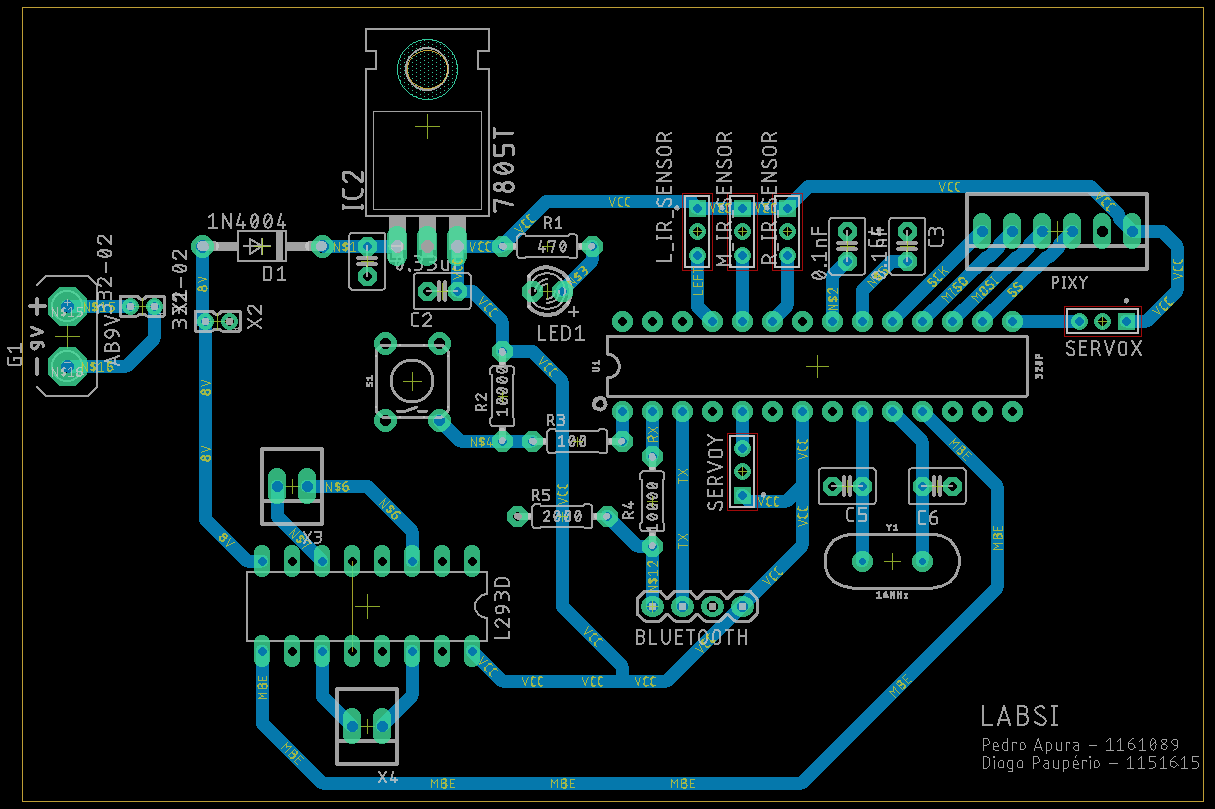
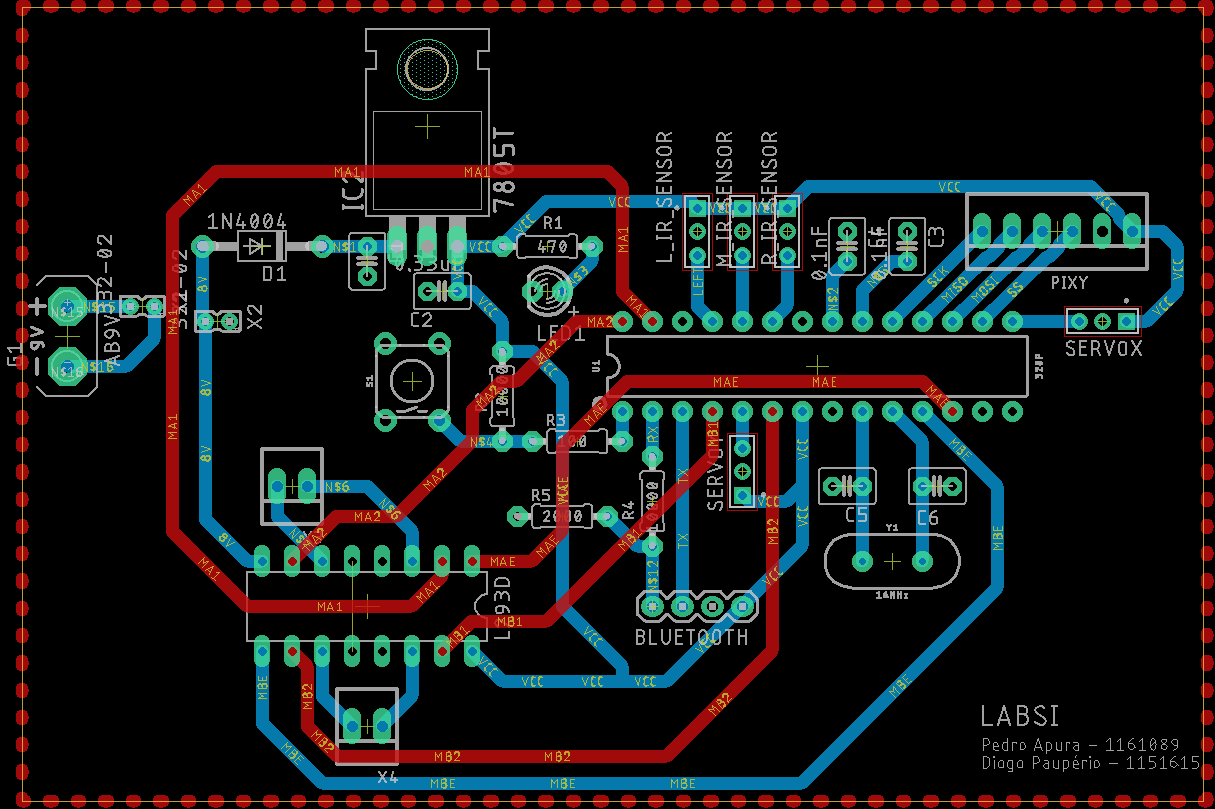
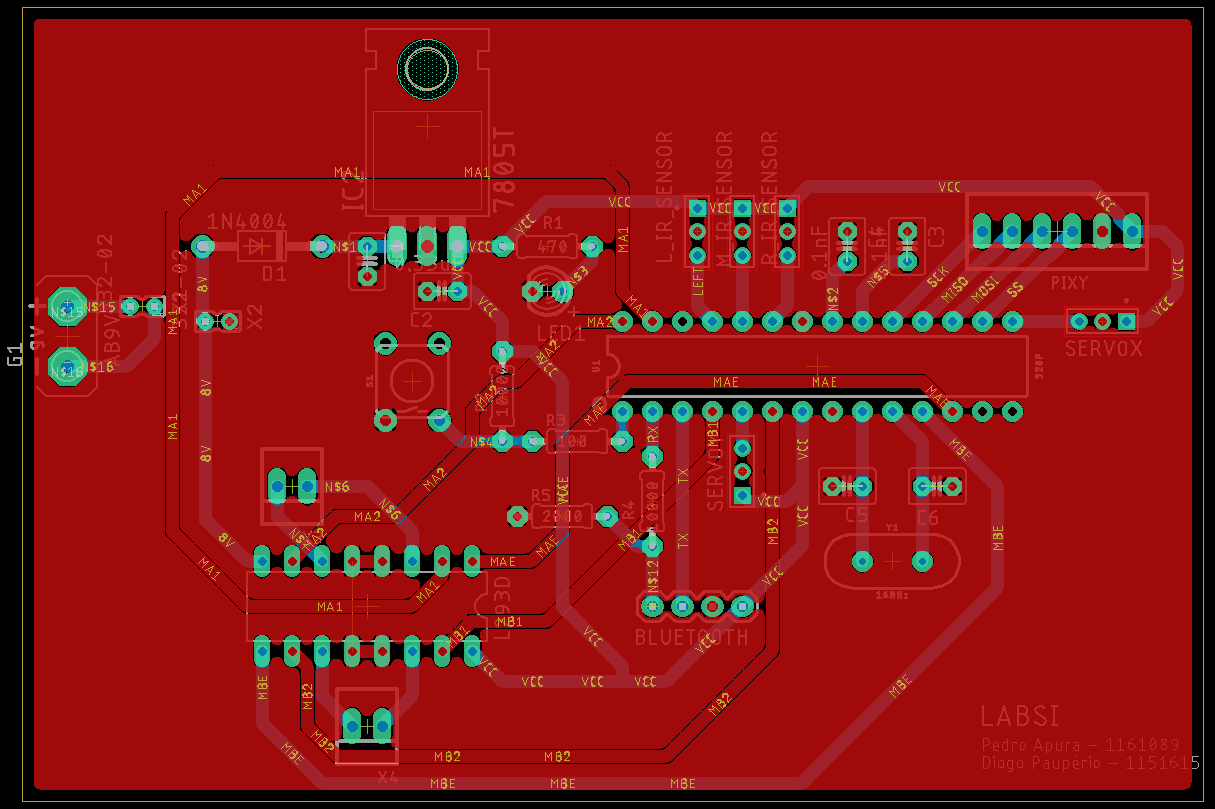
Placa PCB
Funcionamento



FLuxogramas:

[1] AtMega 328P: https://www.sparkfun.com/datasheets/Components/SMD/ATMega328.pdf
Sensor IR: https://pt.aliexpress.com/item/32798240743.html?spm=a2g0o.productlist.0.0.48cb5452w8FFNK&s=p&algo_pvid=56b4404b-28cd-49e4-aea6-5fefce210723&algo_expid=56b4404b-28cd-49e4-aea6-5fefce210723-2&btsid=a6e9d071-b14e-4a6d-8e8d-095783bfeaca&ws_ab_test=searchweb0_0,searchweb201602_5,searchweb201603_53[3] Motor DC: https://www.adafruit.com/product/711
[4] Módulo Bluetooth HC-06: https://www.electrofun.pt/comunicacao/modulo-bluetooth-arduino-hc06#review
[5] Servo Motor: https://www.electrofun.pt/robotica/servo-motor-mg90s
[6] Pixycam: https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:overview
[7] Bateria Tattu: https://www.genstattu.com/tattu-1550mah-11-1v-75c-3s1p-lipo-battey-pack-with-xt60-plug.html
[8] Pixycam SPI interface: https://github.com/rashintha/pixy-avrl
[9] PID: https://moodle.isep.ipp.pt/pluginfile.php/278136/mod_resource/content/4/T10_Controlo_uC_RSB.pdf
[10] Bluetooth: https://abratukhin.blogspot.com/2015/04/connect-atmega328-with-hc-05-zs-040.html